
Robo Race
Overview & Purpose
Robo Race is at the intersection of technology, competition, and innovation, pushing the boundaries of what is possible in the field of autonomous driving. It serves as a platform for research and development, as well as an engaging way to educate and inspire the next generation of engineers and technologists.
The Roborace series is structured into two distinct segments to showcase the diverse capabilities of the autonomous vehicles. The first segment takes place on a flat and smooth racing surface, emphasizing the pursuit of maximum speed and efficiency. In this phase, the autonomous vehicles aim to achieve peak performance in terms of straight-line speed and precise navigation.

The second segment introduces an off-road component, focusing on the vehicles’ ability to navigate challenging terrains and maintain optimal balance. This phase challenges the autonomous systems to adapt to uneven surfaces, showcasing their agility, stability, and off-road maneuvering capabilities. In essence, a rover is a space exploration robotic vehicle used particularly in exploring the land of a planet. It has the capability to travel across the surface of a landscape and other cosmic bodies.

Education Standards
- AI and Machine Learning
- Innovation and Technology Showcase
- Integration of Multiple Discipline Learnings
- Hands – On Experience
- Enjoyable and creative learning Experience
Scientific Principles
Mechanical Physics
- Law of Inertia (1st law of motion) – It states that an object will remain in its state of rest or motion unless acted upon by an external force. In the context of a Robo Race car, this law is fundamental for understanding how the car maintains its state of motion or rest. Programming the car to respond to external forces and make decisions based on its current state is essential for effective autonomous racing.
- Force and Acceleration (2nd law of motion) – It states that the force applied to an object is equal to the mass of the object multiplied by the acceleration of its center of mass.
F = M.A
The second law helps in determining how the force applied by the car’s motors relates to its acceleration. Engineers use this law to optimize the car’s acceleration and deceleration, crucial for navigating the race track efficiently. - Torque – Torque is the measure of the force that causes an object to rotate around an axis. Torque is a critical factor in the performance of the robot’s motors, motor is designed or choosed by keeping the factors that the Robo Car has sufficient power for acceleration, braking, and steering.
- Center of Mass – The center of mass is the location in the body where all of the mass is concentrated. The location of the center of mass is critical for the robot’s stability. We need to optimize the distribution of mass within the robo car to ensure stability during high-speed racing and dynamic movements.
Electrical Physics
- Ohm’s Law – Ohm’s Law (V = I * R) is fundamental in understanding the relationships between voltage (V), current (I), and resistance (R) in electrical circuits.
- Voltage is the electrical potential difference supplied by the batteries to power various components.
- Current represents the flow of electrons through wires and electronic components.
- Resistance is encountered in wires, connectors, and electronic components.
- Circuits – We design circuits for effective power systems within the robo car with the help of circuits that efficiently deliver power to various subsystems while minimizing losses and ensuring overall system reliability.
- Fault analysis – Circuit helps in analyzing potential faults within the electrical system. Understanding circuit behavior allows us to identify and address issues related to short circuits, open circuits, and other electrical malfunctions.
- Power calculations – Power (P) is calculated using the formula P = VI, where V is voltage and I is current. Power calculations are crucial for determining the electrical requirements of components and systems within the Robo Race car.
Mathematical Principles
Geometry
- Chassis Design – We use geometry in designing the chassis for making the overall shape and structure of chassis to create aerodynamic and streamlined designs that minimize air resistance and to increase a robo car’s performance.
- Suspension System – The suspension system, including the placement and angles of suspension components. Proper suspension geometry ensures stability, control, and effective handling during races.
Trigonometry
- Trajectory Planning – We can calculate the angles and distances needed to navigate through curves and corners efficiently.
- Steering Control – Trigonometry is essential in steering control algorithms. Calculating angles and positions based on sensor data helps the autonomous car adjust its steering angles and maintain the desired trajectory.
Wheel Alignment – Geometry and Trigonometry is applied to optimize wheel alignment for stability and improved handling. Proper alignment angles are calculated to enhance traction and reduce tire wear
Sensors Integration and Components Used
LiDAR Sensors – LiDAR sensors are a key component of autonomous vehicles, providing a high-resolution 3D view of their surroundings. They generate and measure millions of data points in real time, creating a precise map of its ever-changing surroundings for safe navigation.

Radar (Radio Detection and Ranging) – Radar sensors use radio waves to detect objects and their velocities. They are useful for longer-range sensing and can operate in various weather conditions.

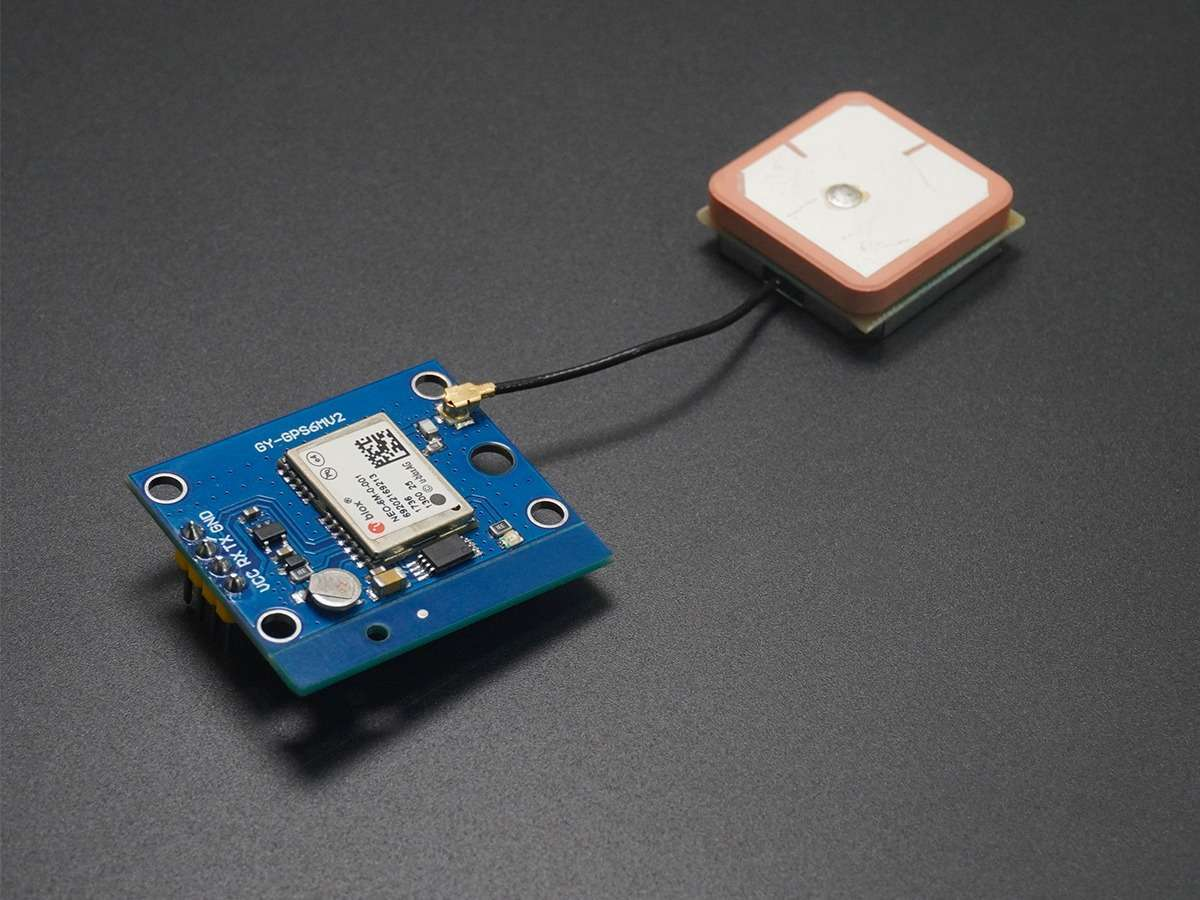
GPS ( Global Positioning System) – GPS is used for localization and navigation. While GPS alone may not provide centimeter-level accuracy, it can be used in conjunction with other sensors for more precise localization.



Responses